
Think about driving via a tunnel in an autonomous automobile, however unbeknownst to you, a crash has stopped visitors up forward. Usually, you’d have to depend on the automotive in entrance of you to know it is best to begin braking. However what in case your automobile may see across the automotive forward and apply the brakes even sooner?
Researchers from MIT and Meta have developed a pc imaginative and prescient approach that might sometime allow an autonomous automobile to do exactly that.
They’ve launched a way that creates bodily correct, 3D fashions of a whole scene, together with areas blocked from view, utilizing photos from a single digital camera place. Their approach makes use of shadows to find out what lies in obstructed parts of the scene.
They name their strategy PlatoNeRF, primarily based on Plato’s allegory of the cave, a passage from the Greek thinker’s “Republic” through which prisoners chained in a cave discern the fact of the surface world primarily based on shadows solid on the cave wall.
By combining lidar (mild detection and ranging) expertise with machine studying, PlatoNeRF can generate extra correct reconstructions of 3D geometry than some present AI methods. Moreover, PlatoNeRF is healthier at easily reconstructing scenes the place shadows are onerous to see, comparable to these with excessive ambient mild or darkish backgrounds.
Along with enhancing the protection of autonomous autos, PlatoNeRF may make AR/VR headsets extra environment friendly by enabling a person to mannequin the geometry of a room with out the necessity to stroll round taking measurements. It may additionally assist warehouse robots discover gadgets in cluttered environments quicker.
“Our key concept was taking these two issues which have been carried out in several disciplines earlier than and pulling them collectively — multibounce lidar and machine studying. It seems that whenever you carry these two collectively, that’s whenever you discover loads of new alternatives to discover and get one of the best of each worlds,” says Tzofi Klinghoffer, an MIT graduate scholar in media arts and sciences, affiliate of the MIT Media Lab, and lead creator of a paper on PlatoNeRF.
Klinghoffer wrote the paper together with his advisor, Ramesh Raskar, affiliate professor of media arts and sciences and chief of the Digicam Tradition Group at MIT; senior creator Rakesh Ranjan, a director of AI analysis at Meta Actuality Labs; in addition to Siddharth Somasundaram at MIT, and Xiaoyu Xiang, Yuchen Fan, and Christian Richardt at Meta. The analysis will probably be offered on the Convention on Laptop Imaginative and prescient and Sample Recognition.
Shedding mild on the issue
Reconstructing a full 3D scene from one digital camera viewpoint is a fancy downside.
Some machine-learning approaches make use of generative AI fashions that attempt to guess what lies within the occluded areas, however these fashions can hallucinate objects that aren’t actually there. Different approaches try and infer the shapes of hidden objects utilizing shadows in a colour picture, however these strategies can battle when shadows are onerous to see.
For PlatoNeRF, the MIT researchers constructed off these approaches utilizing a brand new sensing modality known as single-photon lidar. Lidars map a 3D scene by emitting pulses of sunshine and measuring the time it takes that mild to bounce again to the sensor. As a result of single-photon lidars can detect particular person photons, they supply higher-resolution information.
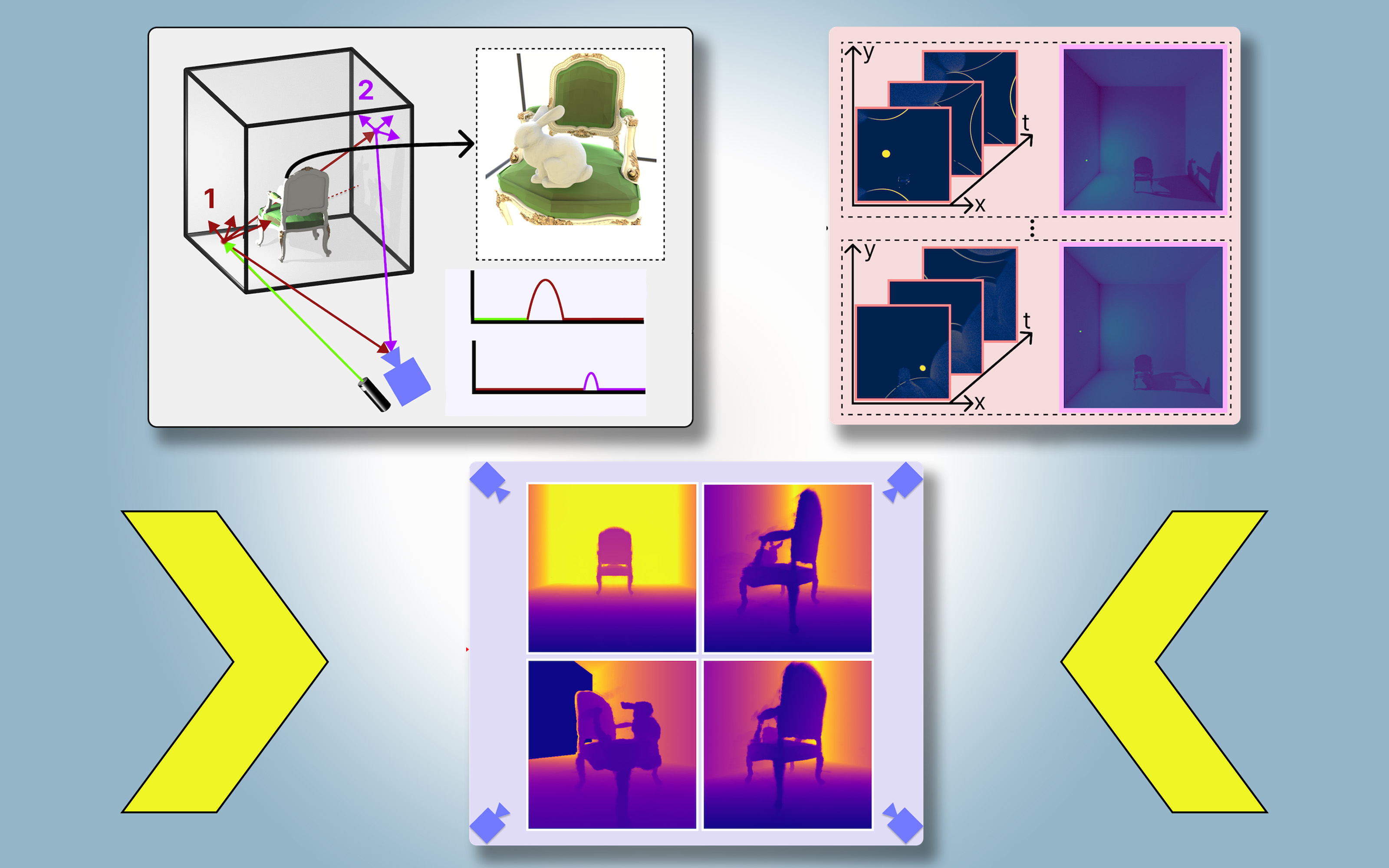
The researchers use a single-photon lidar to light up a goal level within the scene. Some mild bounces off that time and returns on to the sensor. Nevertheless, a lot of the mild scatters and bounces off different objects earlier than returning to the sensor. PlatoNeRF depends on these second bounces of sunshine.
By calculating how lengthy it takes mild to bounce twice after which return to the lidar sensor, PlatoNeRF captures extra details about the scene, together with depth. The second bounce of sunshine additionally comprises details about shadows.
The system traces the secondary rays of sunshine — people who bounce off the goal level to different factors within the scene — to find out which factors lie in shadow (attributable to an absence of sunshine). Based mostly on the situation of those shadows, PlatoNeRF can infer the geometry of hidden objects.
The lidar sequentially illuminates 16 factors, capturing a number of photos which are used to reconstruct the whole 3D scene.
“Each time we illuminate some extent within the scene, we’re creating new shadows. As a result of we have now all these totally different illumination sources, we have now loads of mild rays capturing round, so we’re carving out the area that’s occluded and lies past the seen eye,” Klinghoffer says.
A profitable mixture
Key to PlatoNeRF is the mix of multibounce lidar with a particular sort of machine-learning mannequin often called a neural radiance discipline (NeRF). A NeRF encodes the geometry of a scene into the weights of a neural community, which supplies the mannequin a robust capacity to interpolate, or estimate, novel views of a scene.
This capacity to interpolate additionally results in extremely correct scene reconstructions when mixed with multibounce lidar, Klinghoffer says.
“The most important problem was determining how you can mix these two issues. We actually had to consider the physics of how mild is transporting with multibounce lidar and how you can mannequin that with machine studying,” he says.
They in contrast PlatoNeRF to 2 widespread different strategies, one which solely makes use of lidar and the opposite that solely makes use of a NeRF with a colour picture.
They discovered that their methodology was in a position to outperform each methods, particularly when the lidar sensor had decrease decision. This might make their strategy extra sensible to deploy in the true world, the place decrease decision sensors are widespread in industrial gadgets.
“About 15 years in the past, our group invented the primary digital camera to ‘see’ round corners, that works by exploiting a number of bounces of sunshine, or ‘echoes of sunshine.’ These methods used particular lasers and sensors, and used three bounces of sunshine. Since then, lidar expertise has develop into extra mainstream, that led to our analysis on cameras that may see via fog. This new work makes use of solely two bounces of sunshine, which implies the sign to noise ratio may be very excessive, and 3D reconstruction high quality is spectacular,” Raskar says.
Sooner or later, the researchers wish to strive monitoring greater than two bounces of sunshine to see how that might enhance scene reconstructions. As well as, they’re excited by making use of extra deep studying methods and mixing PlatoNeRF with colour picture measurements to seize texture data.
“Whereas digital camera photos of shadows have lengthy been studied as a way to 3D reconstruction, this work revisits the issue within the context of lidar, demonstrating vital enhancements within the accuracy of reconstructed hidden geometry. The work reveals how intelligent algorithms can allow extraordinary capabilities when mixed with strange sensors — together with the lidar techniques that many people now carry in our pocket,” says David Lindell, an assistant professor within the Division of Laptop Science on the College of Toronto, who was not concerned with this work.









{kind=link}